Supposons maintenant que la fonction de dommage soit connue : on va s’intéresser alors ici aux fonctions de coût de dépollution. Premièrement, elles sont le plus souvent discontinues et exponentielles, car les dispositifs antipollution sont indivisibles. Ensuite, il faut distinguer deux types de coûts de dépollution très différents :
![]() ceux résultant de la réduction de la pollution dans les usines existantes, par investissement dans des équipements de dépollution ne visant qu’à traiter et éliminer des résidus ; si ces activités de dépollution peuvent effectivement réduire les atteintes à la qualité de l’environnement, elles ne représentent qu’une approche curative, et non préventive, de la pollution, et ne s’inscrivent pas dans une logique de développement durable ;
ceux résultant de la réduction de la pollution dans les usines existantes, par investissement dans des équipements de dépollution ne visant qu’à traiter et éliminer des résidus ; si ces activités de dépollution peuvent effectivement réduire les atteintes à la qualité de l’environnement, elles ne représentent qu’une approche curative, et non préventive, de la pollution, et ne s’inscrivent pas dans une logique de développement durable ;
![]() ceux résultant de la modification de la nature d’un bien ou d’un processus de production, accompagnent le renouvellement du stock de capital productif et l’innovation technologique ; la baisse de la pollution est alors prévue dès la conception du bien (voiture propre, avion moins bruyant).
ceux résultant de la modification de la nature d’un bien ou d’un processus de production, accompagnent le renouvellement du stock de capital productif et l’innovation technologique ; la baisse de la pollution est alors prévue dès la conception du bien (voiture propre, avion moins bruyant).
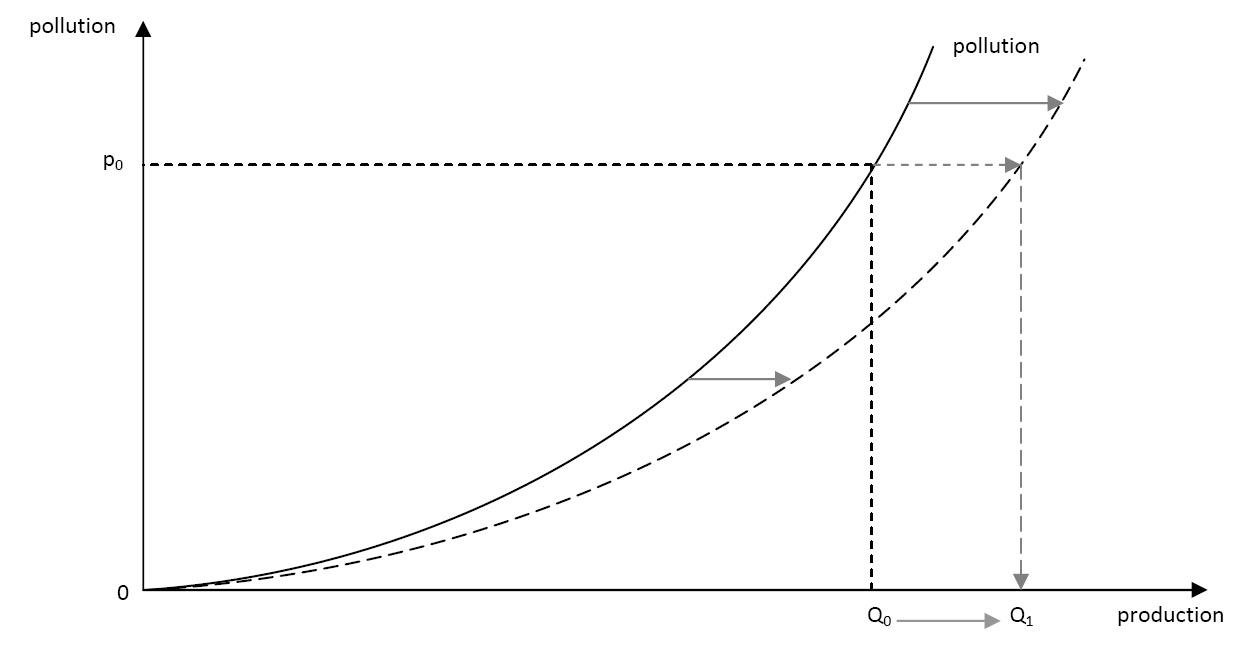
Ces derniers types de coûts sont en général inférieurs aux premiers, et s’accompagnent en outre d’avancées technologiques bénéfiques. En conséquence de quoi ces coûts de dépollution varient avec chaque type de pollution, car ils dépendent étroitement des technologies de dépollution. La découverte de nouvelles technologies permet la mise en œuvre de processus de production et de consommation moins polluants, réduit les coûts de dépollution a posteriori (en diminuant, voire éliminant même les actions de type curatif), et contribue donc efficacement à la diminution du niveau optimal de pollution en abaissant, graphiquement, la courbe de pollution (la pollution étant moindre pour chaque niveau de production), l’optimum écologique (p0) devenant alors compatible avec un niveau de production plus élevé (Q1 < Q0). À un état donné de la technologie, correspond donc un optimum de pollution.